اسکوتر برقی یک وسیله نقلیه شخصی بوده که با استفاده از تعادل شخص کنترل می شود. این وسیله دارای دو عدد چرخ موتوری می باشد که متصل به یک جفت پد متحرک است که اسکوتر ران پای خود را روی آن قرار می دهد. سرعت حرکت اسکوتر با انحراف به عقب یا جلو و جهت حرکت با چرخاندن پدال ها کنترل می شود.
اسکوتر هوشمند امروزه با نام های زیادی در بازار عرضه شده است که اسکوتر برقی و هوشمند و اسمارتبالانس و اسمارتبرد یا سلفبرد از دیگر نامهای این وسیله است.یک مدل از این اسکوترها بدون دسته میباشند و برای حرکت با آنها کافی است فقط یاد بگیرید چگونه تعادل خود را حفط کنید. باتری این اسکوترها دارای دوام بالایی میباشد.
اسکوترهای هوشمند یا اسکوتر برقی متشکل از برد الکترونیکی هوشمند دارای برنامه، باتری، شاسی، چرخ، موتور و قاب می باشد. اسکوترهای برقی بسیار قوی بوده که توسط موتورهای براشلس که از تکنولوژی موتورهای سه فاز در آنها استفاده شده، حرکت می کند. این موتورها دارای سنسور اثر حال می باشند که در هر لحظه موقعیت چرخ ها را به هم از طریق برد اطلاع می دهند. این چرخ ها از یک هسته مرکزی سیم پیچی شده، و آهن ربا تشکیل شده اند. احتمال سوختن چرخ های براشلس اسکوتر بسیار کم است.

بیش تر اسکوتر ها ی برقی امروزه از باتری های لیتیوم یونی بهره می برند ولی بعضی مدل ها هم با باتری های اسیدی کار می کنند. اسکوترهای برقی با قابلیت پیمایش 15 تا 25 کیلومتر بسته به مدل اسکوتر، وزن کاربر، شیب وجنس زمین و مهارت شخص (که به مرور زیاد می شود) به ازای هر بار شارژ کردن است.اسکوترهای برقی دارای دو موتور هستند و انرژی لازمه را از باتری ها می گیرند.سپس این قدرت تولیدی در موتور به تایرها منتقل می شود و سبب می شود تا تایر ها به جلو حرکت کنند یا به اطراف بچرخند.توان موتور اسکوتر برقی شما است که تعیین می کند اسکوتر برقی تا چه اندازه می تواند سریع حرکت کند ،البته این اسکوتر ها دارای محدودیت سرعت هستند اما سرعت آن ها حتی در مدل های کلاسیک و ساده نیز رضایت بخش خواهد بود.
اسکوتر برقی به وسیله دو ژیروسکوپی که در دو طرف اسکوتر قرار داده شده زاویه ای را که شما به اسکوتر خود می دهید را متوجه شده و با توجه به میزان زاویه، دستور حرکت و یا کم یا زیاد کردن سرعت را به موتور می دهد.
اسکوتر برقی دارای دو موتور براشلس است که در دو قسمت اسکوتر قرار گرفته که اسکوتر را به حرکت در می آورد.در اسکوتر برقی موتور اسکوتر در واقع هم موتور و نیروی محرکه است و هم نقش چرخ اسکوتر را ایفا می کند، به این صورت که موتور در خود چرخ قرار گرفته و پس از دریافت دستور حرکت به عقب یا جلو میچرخد و باعث حرکت اسکوتر می شود.
بردهای سه تکه ۴ عدد سنسور چشمی دارند، هنگامی که وزن (شخص)، روی دستگاه قرار می گیرد، تشخیص داده و شروع به کار می کند. زمانی که، فرد روی اسکوتر قرار می گیرد، سنسورهای زیر پا به ژیرسکوپ ها دستور حرکت خواهند داد و ژیرسکوپ زاویه اسشکوتر را نسبت به جلو وعقب تشخیص می دهد، واسکوتر به جلو یا عقب حرکت خواهد کرد.
اما در اسکوترهای دو برد این حرکت فقط از طریق دو بردی که بصورت مجزا کار می کند دستور می گیرد. بدین معنی که فقط یک کابل، دو برد را به هم متصل کرده است که موقعیت هر چرخ را مشخص می کند. این بردها ( بردهای دو برد )، هرکدام دارای سیستم مجزا هستند و مادر برد یا برد اصلی در اسکوتر وجود ندارد. به طور کلی از لحاظ کارکرد، بردهای ۳ تکه وضعیت بهتری دارند، و تعمیرات برروی بردهای سه تکه بهتر انجام می شود.

موتور براشلس چیست و چگونه کار می کند؟
در این موتورها سیم پیچ ثابت بوده و آهنرباها می چرخند. از آنجایی که سیم پیچ در این موتورها ثابت است، نیازی به برسها وجود ندارد. کار تقسیم ولتاژ بین سیم پیچها راکنترل کننده سرعت موتور یا ESC انجام می دهد.به این نکته دقت کنید که نمی توان از کنترلر سرعت موتورهای معمولی و موتورهای براشلس بجای یکدیگر استفاده نمود زیرا این دو، کار کاملا متفاوتی انجام می دهند.سریعترین راه برای تشخیص اینکه یک موتور براشلس است یا معمولی این است که به سیم های آن نگاه کنید. موتورهای معمولی دو تا سیم دارند در حالی که موتورهای براشلس دارای سه سیم هستند. سیم وسط فیدبک نام دارد و تغییر جای دو سیم دیگر باعت خواهد شد که جهت چرخش موتور برعکس شود. از آنجایی که برس وجود ندارد، خوردگی آن هم در این موتورها وجود ندارد. نیازی به نگرانی برای تمیز کردن برس ها و محل اتصالشان وجود ندارد. اصطکاک برس برای گرفتن سرعت موتور وجود ندارد. باز هم به همین علت، مدت زمان کارکرد موتور با یک باتری در این موتورها بالاتر است. نسبت توان به وزن بسیار بالاتری دارند.

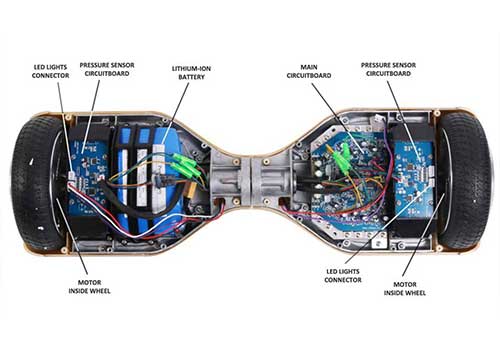
در داخل یک اسکوتر چیست؟
.jpg)
پدال ها قسمتی هستند که پاها روی آن ها قرار میگیرند و از پلاستیک نرم و قابل انعطاف ساخته شده اند در جلو و عقب هر یک از پدال ها زایده های پلاستیکی وجود دارند که به آن سوئیچ میگویند.
زمانی که پا به سمت جلو یا عقب فشرده می شود سوییچ ها به سمت پایین حرکت میکنند و در بین LED و سنسور مادون قرمز قرار میگیرند.
LED های مادون قرمز روبروی حسگرها قرار دارند و زمانی که سوییچ بین این دو قرار می گیرد نور مادون قرمز به حسگر نمی رسد و این پیام به برد اصلی ارسال می شود که پای شما کدام پدال و در کدام جهت را فشار داده است.

قاب چرخ ها هر یک حاوی موتور و سنسور شیب و سنسور سرعت است. شیب اسکوتر و سرعت چرخش از چرخ ها و از طریق بردهای کناری به برد مرکزی ارسال می شود.
بردهای کناری یا بردهای ژیروسکوپ رابط بین چرخ ها و برد اصلی هستند اطلاعات شیب و سرعت را از چرخ ها دریافت میکنند به برد اصلی ارسال میکنند و فرمان چرخیدن چرخ و سرعت و جهت چرخیدن را از برد اصلی دریافت و به چرخ ها ارسال میکنند.






 کامپیوتر")
